
The toolbox is branched from the source tree of "Little Ben".
Ben was one of only six vehicles to successfully complete the DARPA Urban Challenge on Nov. 3, 2007 in Victorville, CA.
| The Sick LIDAR Matlab/C++ Toolbox |
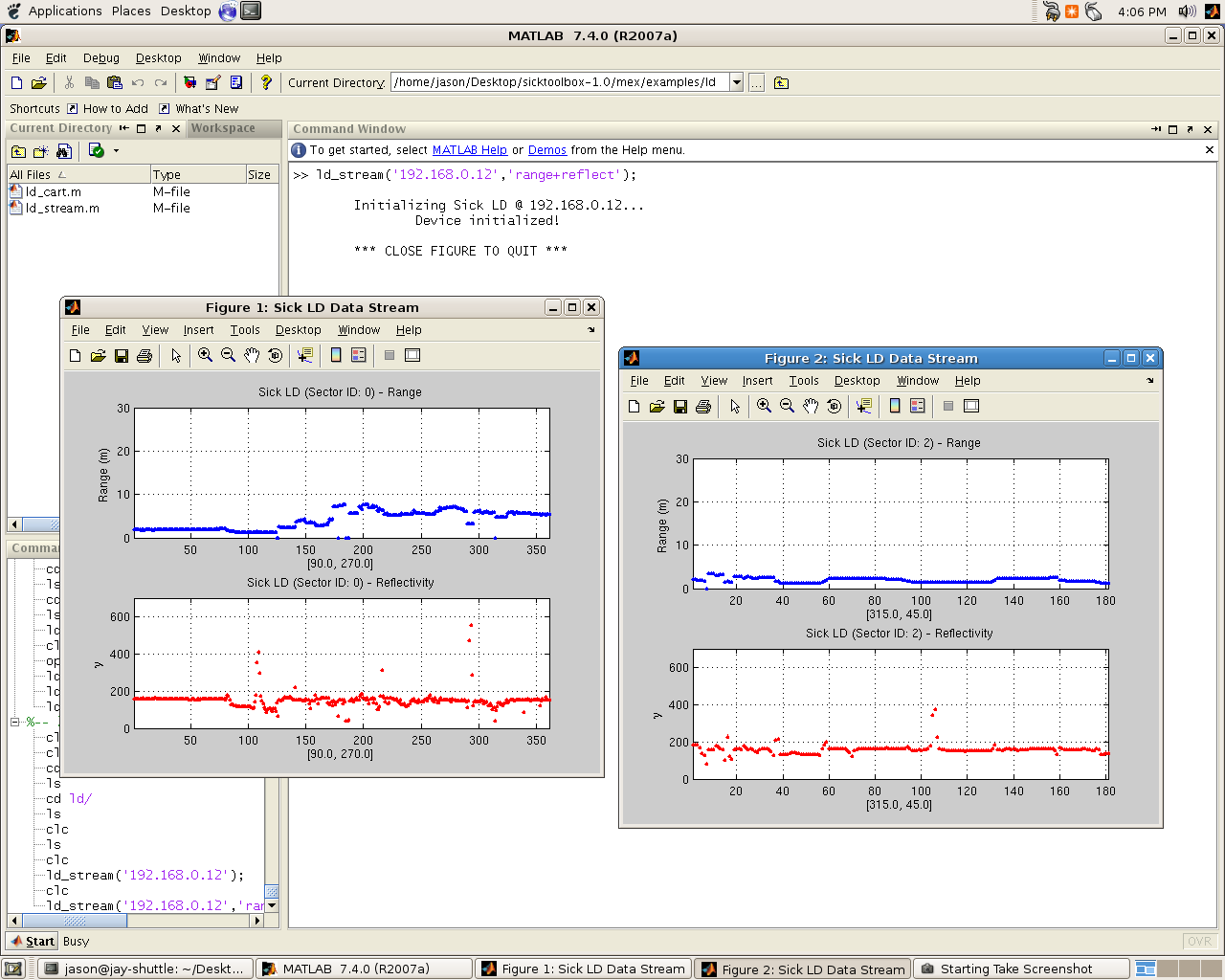
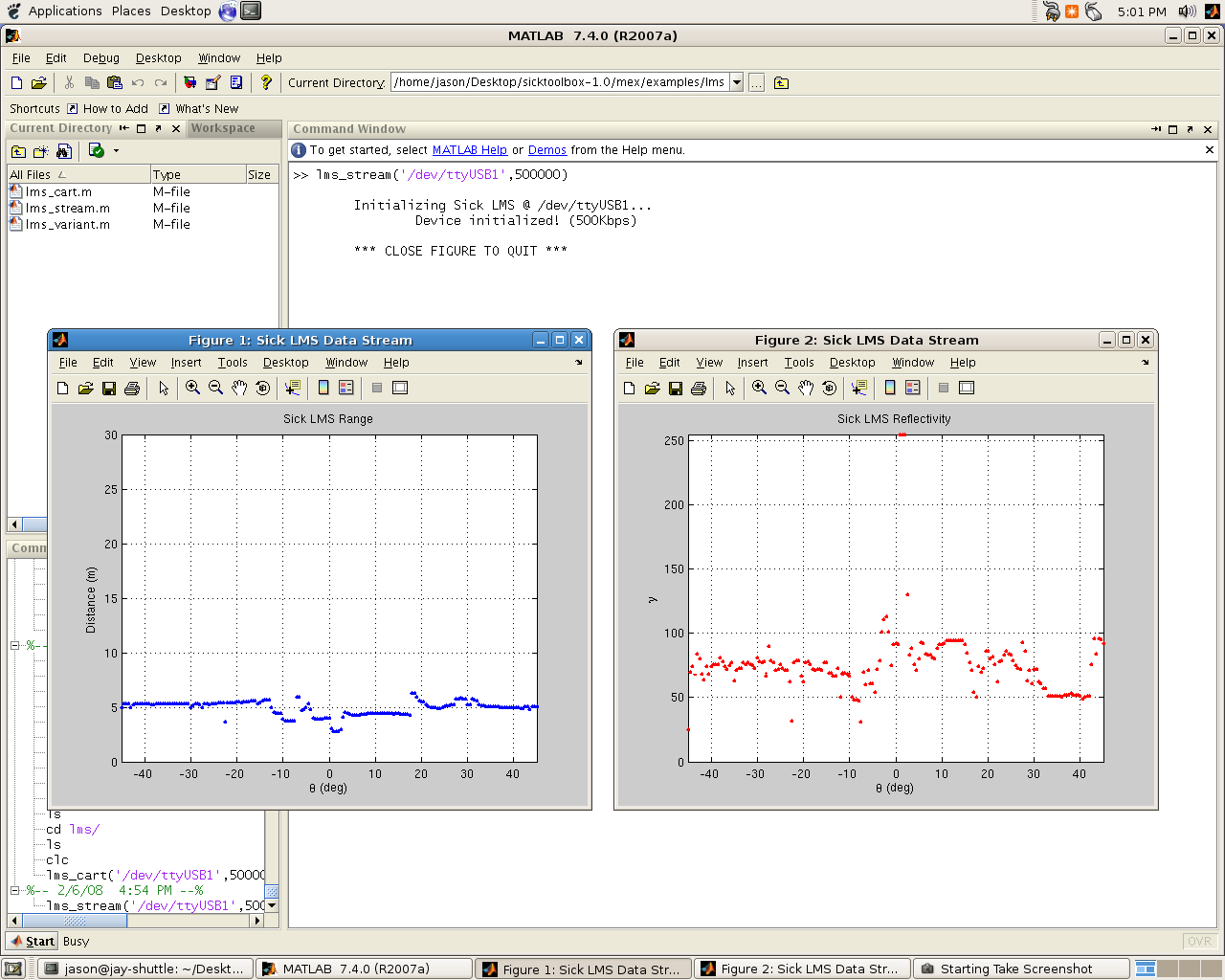
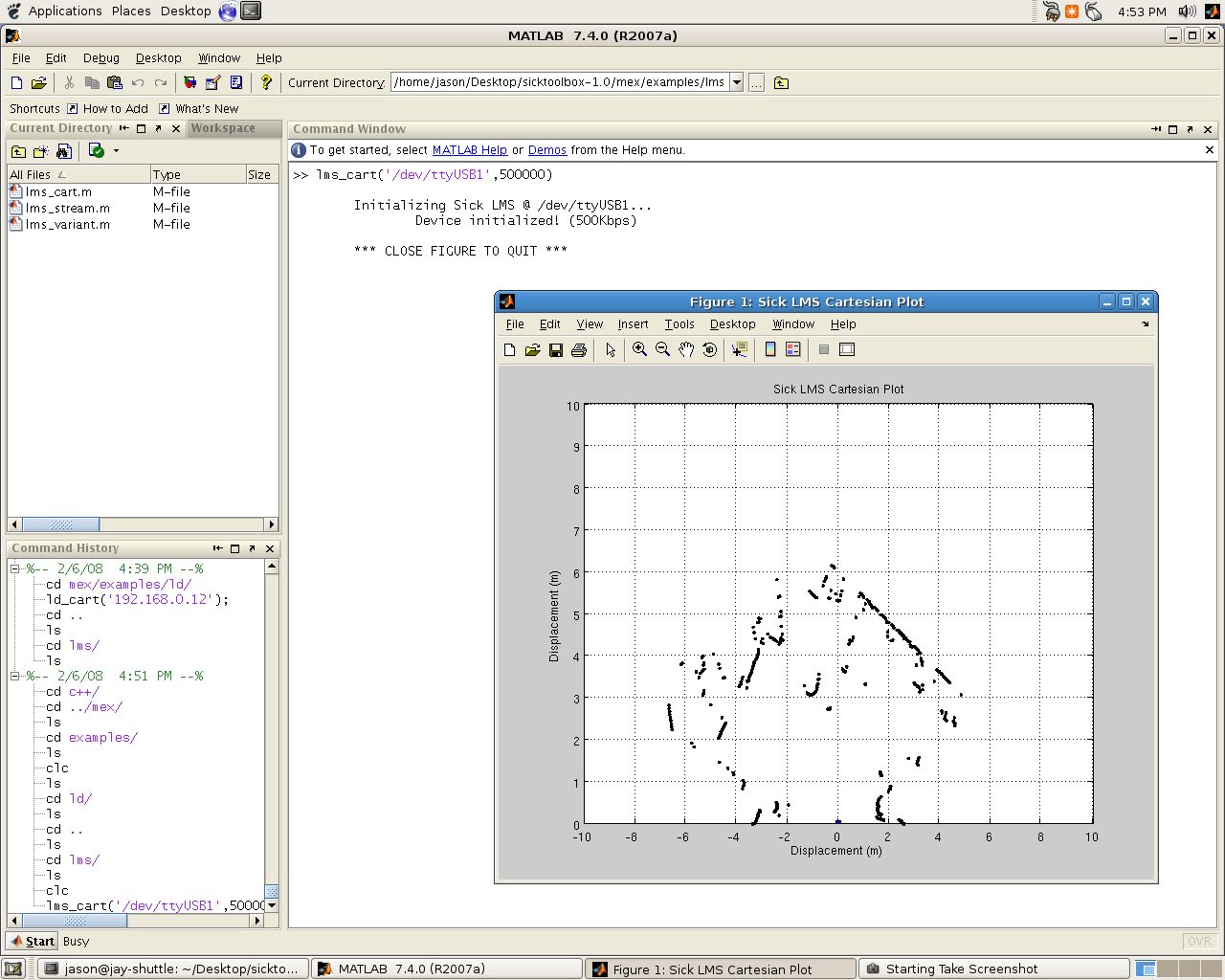
The Sick LIDAR Matlab/C++ Toolbox is an open-source software package released under a BSD Open-Source License that provides stable and easy-to-use C++ drivers for Sick LMS 2xx and Sick LD laser range finders. In addition to low-level drivers, the package also features an easy to use Mex interface, which allows the end-user to stream real-time range and reflectivity data directly into Matlab. This feature is especially attractive as it facilitates the rapid development of algorithms by exploiting the high-level functionality afforded by Matlab's vector-based operations. The toolbox is branched from the source code used by the Ben Franklin Racing Team during the DARPA Urban Challenge. The team was formed through a collaboration lead by the University of Pennsylvania with partners Lehigh University and Lockheed Martin. The team's fully-autonomous entry — Little Ben — employed five Sick LMS 291 and LD-LRS LIDARs during the race, and was one of only six vehicles to successfully complete the 57 mile Urban Challenge Final Event.

The Sick LIDAR Matlab/C++ Toolbox is currently maintained by Jason Derenick of the GRASP Laboratory at the University of Pennsylvania. The toolbox was originally developed by Jason Derenick and Thomas Miller at Lehigh University as members of the Vision, Assistive Devices, and Experimental Robotics (VADER) Laboratory in the Department of Computer Science and Engineering.
We'd like to thank our teammates on the Ben Franklin Racing Team who also contributed to the development of this toolbox, to include Aleksandr Kushleyev, Tully Foote, Jon Bohren, Alex Stewart, Brian Satterfield, Professor Daniel Lee and Professor John Spletzer.
This work was funded in part by Thales Communications, Inc., the Commonwealth of Pennsylvania, Department of Community and Economic Development, and by the National Science Foundation Partnerships for Innovation (PFI) Program under Grant No. 0650115. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Feature requests and bug reports should be submitted using the project's Sourceforge tracker system.
You can also send inquiries to: jasonder (at) seas (dot) upenn (dot) edu.

